Sign up for the QMED & MD+DI Daily newsletter.
Harvard researchers create a hybrid rigid-soft robotic arm for endoscopes that lies flat while it snakes through the body, before popping up to assist in surgical procedures at the desired location.
Kristopher Sturgis
August 28, 2017
3 Min Read

A photo of the soft pop-up arm performing tissue countertraction during an ex-vivo test on a porcine stomach. Harvard University
When it comes to developing endoscopic technologies, size, flexibility, and rigidity are all difficult concepts to marry. Endoscopes must be small and flexible to navigate the narrow passages of the body, but also need to be rigid enough to manipulate and remove tissue once they arrive at the surgical site. A new technology developed at Harvard's Wyss Institute may offer a solution that checks all three boxes, taking endoscopic surgery to the next level.
Thanks to soft robotic technologies, researchers have developed a new hybrid-rigid soft robotic arm for endoscopes that aims to integrate sensing technologies with unprecedented flexibility and precision. The new device was actually built using a manufacturing model based on pop-up fabrication and soft lithography, meaning that the soft robotic arm lies flat on an endoscope until it arrives at the desired location, where it can pop up to assist in surgical procedures.
Sheila Russo, PhD, postdoctoral fellow at the Wyss Institute and lead author on the work, told university news that integrating soft robotics into the pop-up structures will provide surgeons with the force output and control necessary for delicate endoscopic procedures.
"We found that by integrating soft fluidic microactuators into the rigid pop-up structures, we could create soft pop-up mechanisms that increased the performance of the actuators in terms of the force output and the predictability and controllability of the motion," she said. "The idea behind this technology is basically to obtain the best of both worlds by combining soft robotic technologies with origami-inspired rigid structures. Using this fabrication method, we were able to design a device that can lie flat when the endoscope is navigating to the surgical area, and when the surgeon reaches the area they want to operate on, they can deploy a soft system that can safely and effectively interact with tissue."
|
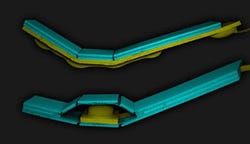
A diagram depicting the hybrid soft pop-up actuators. The image is colored to differentiate between the soft (yellow) structures and the rigid (blue) structures. |
Russo and her team actually designed the soft actuators to be powered by water, and they connect to the rigid components through an irreversible chemical bond, meaning they don't require any adhesive. They also integrated simple capacitive sensing technologies that can be used to measure the force applied to the surrounding tissue, providing surgeons with an improved sense of where the arm is and how it's moving inside the body.
Of course, all materials used to create the arm are completely biocompatible, and the arm itself comes equipped with a suction cup--inspired by octopus tentacles--to help surgeons safely interact with tissue. The technology was even designed to allow for mass manufacturing, making the new arm both accessible and cost effective.
The team of researchers demonstrated that the device could be scaled down to as small as one millimeter, which would allow for use in the smallest endoscopic procedures, such as lung and brain procedures. The hope is that with this kind of size flexibility, the technology can have a broader impact across a wide range of endoscopic procedures.
As the group moves forward, they hope to begin testing the device in vivo, and believe that the new robotic arm could be among the first to pave the way for smaller, smarter soft robotic technologies.
Kristopher Sturgis is a contributor to Qmed.
[Top image courtesy of HARVARD UNIVERSITY; Second image courtesy of WYSS INSTITUTE AT HARVARD UNIVERSITY]
About the Author(s)
You May Also Like

